8.4. Импульсные стабилизаторы
Общим недостатком компенсационных
стабилизаторов напряжения является низкий КПД из-за потерь в транзисторах регулирующего
элемента, что, кроме того, требует мощных теплоотводов, значительно превышающих
по габаритам и массе сами стабилизаторы. Более прогрессивным техническим решением
являются импульсные стабилизаторы напряжения (ИСН), в которых транзисторы регулирующих
элементов работают в ключевом режиме. При использовании высокочастотных транзисторов
проблема КПД и массо-габаритных характеристик в таких стабилизаторах решается
достаточно радикально.
Существуют три основные
схемы ИСН [55]: последовательный ИСН понижающего типа (рис. 12.15), параллельный
ИСН повышающего (рис. 12.16) и параллельный инвертирующего (рис. 12. 17) типа.
Все три схемы содержат накопительный дроссель L, регулирующий элемент 1, блокировочный
диод VD, элементы управления 2, 3 и конденсатор фильтра С. 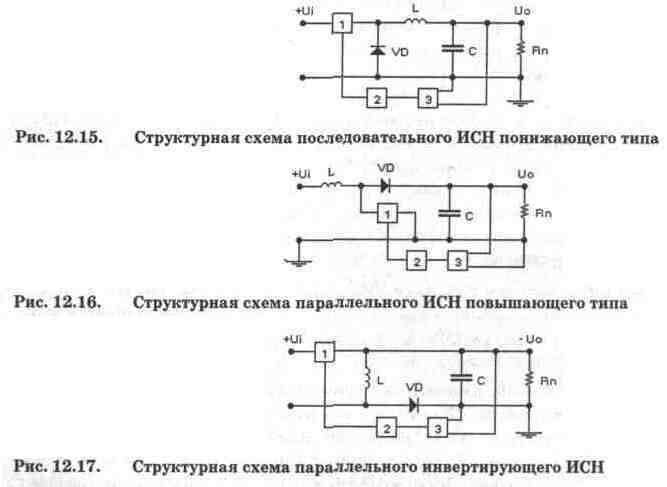
Импульсный последовательный
стабилизатор понижающего типа выполняется по структурной схеме, приведенной
на рис. 12.15, в которой регулирующий элемент 1 и дроссель L включены последовательно
с нагрузкой Rn. В качестве РЭ используется транзистор, работающий в ключевом
режиме. При открытом в течение времени Т„ транзисторе энергия от входного источника
постоянного тока Ui (или выпрямителя с выходным напряжением Uo) передается в
нагрузку через дроссель L, в котором накапливается энергия. При закрытом в течение
времени Тп транзисторе накопленная в дросселе энергия через диод VD передается
в нагрузку. Период коммутации (преобразования) равен Т=Ти+Тп. Частота коммутации
(преобразования) F=1/T. Отношение длительности открытого состояния транзистора,
при котором генерируется импульс напряжения длительностью Ти, к периоду коммутации
Т называется коэффициентом заполнения Кз=Ти/Т.
Таким образом, в импульсном
стабилизаторе регулирующий элемент 1 преобразует (модулирует) входное постоянное
напряжение Ui в серию последовательных импульсов определенной длительности и
частоты, а сглаживающий фильтр, состоящий из диода VD, дросселя L и конденсатора
С, демодулирует их в постоянное напряжение Uo. При изменении выходного напряжения
Uo или тока в нагрузке Rn в импульсном стабилизаторе с помощью цепи обратной
связи, состоящей из измерительного элемента 3 и схемы управления 2, длительность
импульсов изменяется таким образом, чтобы выходное напряжение Uo оставалось
неизменным (с определенной степенью точности).
Импульсный режим работы
позволяет существенно уменьшить потери в регулирующем элементе и тем самым повысить
КПД источника питания, уменьшить его массу и габариты. В этом состоит основное
преимущество импульсных стабилизаторов перед компенсационными стабилизаторами
непрерывного действия.
Импульсный параллельный
стабилизатор (повышающего типа) выполняется по структурной схеме на рис. 12.16,
в которой регулирующий элемент 1 подключен параллельно нагрузке Rn. Когда регулирующий
транзистор открыт, ток от источника питания Ui протекает через дроссель L, запасая
в нем энергию. Диод VD при этом находится в закрытом состоянии и поэтому не
позволяет конденсатору С разрядиться через открытый регулирующий транзистор.
Ток в нагрузку в этот промежуток времени поступает только от конденсатора С.
В момент времени, когда регулирующий транзистор закрывается, ЭДС самоиндукции
дросселя L суммируется с входным напряжением и энергия дросселя передается в
нагрузку, при этом выходное напряжение оказывается больше входного напряжения
питания Ui. В отличие от схемы на рис. 12.15 здесь дроссель не является элементом
фильтра, а выходное напряжение становится больше входного на величину, определяемую
индуктивностью дросселя L и временем открытого состояния регулирующего транзистора
(или скважностью управляющих импульсов).
Схема управления стабилизатором
на рис. 12.16 построена таким образом, что, например, при повышении входного
напряжения питания Ui уменьшается длительность открытого состояния регулирующего
транзистора на такую величину, что выходное напряжение Uo остается неизменным.
Импульсный параллельный
инвертирующий стабилизатор выполняется по структурной схеме, приведенной на
рис. 12.17. В отличие от схемы на рис. 12.16 здесь дроссель L включен параллельно
нагрузке Rn, а регулирующий элемент 1 — последовательно с ней. Блокирующий диод
отделяет конденсатор фильтра С и нагрузку Rn от регулирующего элемента по постоянному
току. Стабилизатор обладает свойством изменения (инвертирования) полярности
выходного напряжения Uo относительно полярности входного напряжения питания.
Импульсные стабилизаторы
в зависимости от способа управления регулирующим транзистором могут выполняться
с широтно-импульсной модуляцией (ШИМ), частотно-импульсной модуляцией (ЧИМ)
или релейным управлением. В ШИМ-ста-билизаторах в процессе работы изменяется
длительность импульса Ти, а частота коммутации остается неизменной; в ЧИМ-стабилизаторах
изменяется частота коммутации, а длительность импульса Ти остается постоянной;
в релейных стабилизаторах в процессе регулирования напряжения изменяется как
длительность импульсов, так и частота их следования.
Наибольшее распространение
на практике получил последовательный ИСН (рис. 12.15), в котором накопительный
дроссель одновременно является элементом сглаживающего
LC-фильтра. В стабилизаторах на рис. 12.16 и 12.17 дроссель L не участвует в
сглаживании пульсации выходного напряжения. В этих схемах сглаживание пульсации
достигается только за счет увеличения емкости конденсатора С, что приводит к
увеличению массы и габаритов фильтра и устройства в целом.
Статическая регулировочная
характеристика, определяемая для стабилизатора на рис. 12.15 по формуле Uo/Ui=Kз
(1 — Кг), представляет собой прямую, наклон которой зависит (без учета потерь
в регулирующем транзисторе и диоде) от отношения активных сопротивлений дросселя
и нагрузки Kг=Rd/Rn. Напряжение Uo на нагрузке определяется относительной длительностью
управляющих импульсов (при постоянном Ui) и не может быть больше напряжения
питания, а линейность данной характеристики соответствует условиям устойчивой
работы ИСН.
Рассмотрим основные элементы
ИСН на рис. 12.15. Начнем с основного блока, схема которого показана на рис.
12.18. 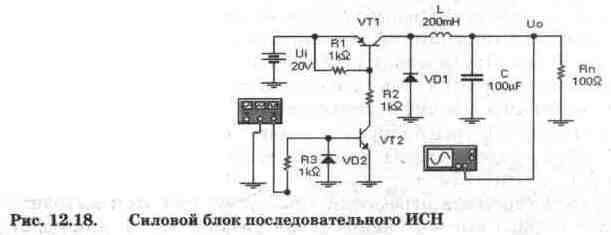
Блок включает в себя силовую
часть и регулирующий элемент на транзисторе VT1, управляемый ключом на транзисторе
VT2 (диод VD2 служит для защиты базового перехода VT2 при большом отрицательном
входном сигнале управления). Сопротивление резистора R1 выбирается из условия
обеспечения закрытого состояния транзистора VT1 (100…900 Ом), a R2 — ориентировочно
из условия kbUi=R2 Ikmax где k=l,5…2 — коэффициент запаса по насыщению; b,
Ikmax — коэффициент усиления тока и максимальный импульсный коллекторный ток
транзистора VT1. Аналогичным образом выбирается сопротивление резистора R3,
но при этом в расчетах Ui заменяется амплитудой управляющего импульса функционального
генератора. Отметим, что при выборе количества транзисторов РЭ можно руководствоваться
рекомендациями, приведенными для схемы на рис. 12.12.
Исходными данными для выбора
параметров схемы на рис. 12.18 являются:
напряжение Ui и пределы
его изменения; внутреннее сопротивление Ri источника Ui; номинальное выходное
напряжение стабилизатора Uo и допустимые пределы его регулировки; максимальный
Inmax и минимальный Imin токи нагрузки, допустимая амплитуда пульсации выходного
напряжения стабилизатора; коэффициент стабилизации Кn и внутреннее сопротивление
Ro; максимальный температурный уход напряжения Uo и др. Порядок выбора параметров
следующий:
1. Выбираем частоту преобразования
F (до 100 кГц, для модели — единицы килогерц) и принимаем ориентировочно КПД=0,85…0,95.
2. Определяем минимальное
и максимальное значения относительной длительности (коэффициента заполнения)
импульса напряжения на входе фильтра: 
3. Из условия сохранения
режима непрерывности токов дросселя определяем его
минимальную индуктивность 
4. Вычисляем произведение
LC по заданному значению напряжения пульсации U„ 
откуда затем находим емкость
конденсатора С.
Произведение LC определяет
не только уровень пульсации, но и характер переходных процессов выходного напряжения
после включения стабилизатора.
На рис. 12.19 показаны
результаты моделирования схемы на рис. 12.18 при следующих данных: F=1 кГц,
К,=0,5, Rn=100 Ом, L=200 мГн, С=100 мкФ (для рис. 12.19, а) и С=1 мкФ (для рис.
12.19, б). Как видно из рисунков, при сравнительно большом значении произведения
LC переходная характеристика исследуемой схемы имеет колебательный характер,
что приводит к скачкам выходного напряжения, которые могут оказаться опасными
для потребителя (нагрузки). 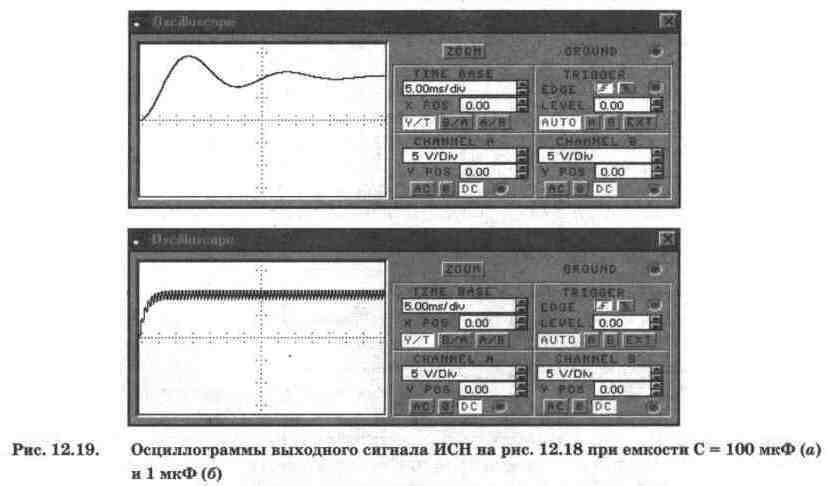
Перейдем к рассмотрению
следующего функционального узла ИСН — схемы управления и измерительного элемента.
При этом целесообразно рассмотреть характеристики используемых в ИСН модуляторов.
Импульсные стабилизаторы
с ШИМ по сравнению со стабилизаторами двух других типов имеют следующие преимущества:
О обеспечивается высокий
КПД и оптимальная частота преобразования независимо от напряжения первичного
источника питания и тока нагрузки; частота пульсации на нагрузке является неизменной,
что имеет существенное значение для ряда потребителей электроэнергии;
О реализуется возможность
одновременной синхронизации частот преобразования неограниченного числа ИСН,
что исключает опасность возникновения биений частот при питании нескольких ИСН
от общего первичного источника постоянного тока. Кроме того, при работе ИСН
на нерегулируемый преобразователь (например, усилитель мощности) возможна синхронизация
частот обоих устройств.
Недостатком ИСН с ШИМ по
сравнению со стабилизатором релейного типа является более сложная схема управления,
содержащая обычно дополнительный задающий генератор.
Импульсные стабилизаторы
с ЧИМ, не имея существенных преимуществ перед другими типами ИСН, обладают следующими
недостатками:
О сложность реализации
регуляторов частоты в широких пределах, особенно при больших изменениях напряжения
питания и тока нагрузки;
О отсутствие возможности
реализации отмеченных выше преимуществ системы регулирования с ШИМ.
Последний недостаток относится
и к релейным (или двухпозиционным) ИСН, которые характеризуются также сравнительно
большой пульсацией напряжения на нагрузке (в стабилизаторах с ШИМ или ЧИМ пульсации
выходного напряжения принципиально могут быть сведены к нулю, что невозможно
достичь в релейных стабилизаторах).
В общем случае блок 3 (рис.
12.20) содержит делитель напряжения, источник опорного напряжения ИОН, сравнивающий
элемент и усилитель рассогласования. Эти элементы выполняют такие же функции,
что и в компенсационных стабилизаторах. Для ИСН с ШИМ к этим устройствам добавляются
формирователь синхронизирующего напряжения (задающий генератор) и пороговое
устройство, с помощью которых осуществляется формирование модулированных по
длительности импульсов. Изменение длительности управляющего импульса осуществляется
модуляцией его переднего или заднего фронта. 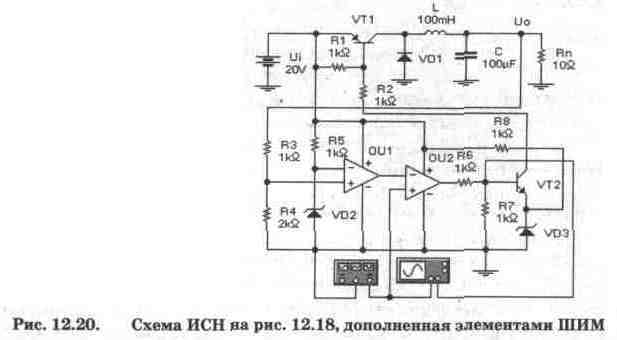
При модуляции переднего
фронта линейно изменяющееся напряжение синхронизации на каждом периоде нарастает,
а при модуляции заднего фронта управляющее напряжение в каждом периоде уменьшается.
При модуляции фронтов напряжение синхронизации на каждом периоде нарастает и
спадает. Этот вид модуляции по сравнению с односторонней модуляцией позволяет
реализовать более быстродействующие ИСН, так как в этом случае мгновенное значение
управляющего напряжения влияет на формирование фронтов.
Коэффициент передачи схемы
управления, устанавливающий связь между изменениями относительной длительности
импульсов на входе сглаживающего фильтра
и напряжения на нагрузке (для ШИМ), равен 
коэффициенты передачи делителя
напряжения и усилителя рассогласования соответственно; Uy — амплитуда синхронизирующего
напряжения.
Полная схема ИСН с элементами
ШИМ показана на рис. 12.20. Делитель напряжения выполнен на резисторах R3, R4,
источник опорного напряжения — на резисторе R5 и стабилитроне VD2, усилитель
сигнала рассогласования — на OU1, пороговое устройство — на OU2. Поскольку оба
ОУ питаются от однополярного источника, для согласования уровней в ключевом
каскаде на VT2 в эмиттерную цепь включен параметрический стабилизатор (VD3,
R8). В качестве задающего использован функциональный генератор в режиме треугольных
импульсов; при модуляции по переднему фронту коэффициент заполнения (Duty cycle)
выбирается максимальным (99%), при модуляции по заднему фронту — минимальным
(0,1%), при модуляции по обоим фронтам — 50%. На рис. 12.21 показан результат
моделирования процесса формирования управляющих импульсов при модуляции по переднему
фронту. 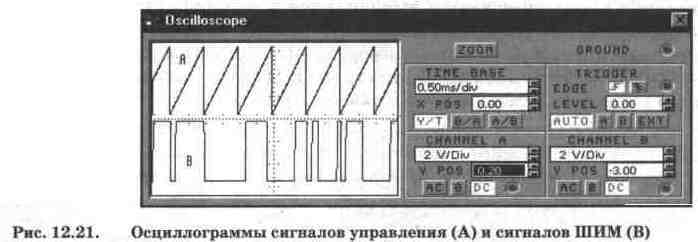
Приведенные на рис. 12.21
результаты получены при Rn=100 Ом и Ui = 20 В. Как видно из рис. 12.21, сразу
после включения источника питания формируются импульсы управления максимальной
длительности, затем наступает продолжительная пауза из-за положительного скачка
выходного напряжения Uo, затем опять идетт форсированный режим из-за отрицательного
скачка Uo. Установившийся режим формирования управляющего импульса наступает
через несколько периодов управляющего сигнала задающего генератора.
Контрольные задания
1. Для схемы на рис. 12.18
получите зависимость Uo=f(K,) при F=1 кГц, Uy=3 В (однополярность управляющих
прямоугольных импульсов обеспечивается установкой на функциональном генераторе
постоянной составляющей Offset=3 В, коэффициент заполнения К. задается выбором
параметра Duty cycle), Ui=30 В, Rn=100 Ом, L=100 мГн, С=100 мкФ.
2. Для схемы на рис. 12.18
исследуйте зависимость формы переходных процессов от активного сопротивления
потерь Rd включая последовательно с дросселем сопротивление 0,1… 10 Ом.
3. Исследуйте ИСН по схеме
рис. 12.20 при модуляции заднего фронта, одновременно по переднему и заднему
фронту и сравните результаты по времени выхода устройств в установившийся режим.
4. Для каждого способа
формирования управляющих сигналов в установившемся режиме получите зависимость
периода формирования управляющих сигналов от сопротивления нагрузки Rn в диапазоне
10… 1000 Ом и входного напряжения Ui в диапазоне 15…40 В.
|








