Специализированные преобразователи
используются для моделирования нелинейных элементов (или просто нелинейностей)
систем управления, связанных со скачкообразными изменениями коэффициентов передачи
отдельных звеньев (их часто называют типичными нелйнейностями). К таким нелинейностям
приводит наличие ограничения координат по модулю, наличие зоны нечувствительности,
наличие люфта (зазора) в кинематических парах и др. Кроме того, они используются
также для улучшения динамических характеристик систем управления [29, 65]. Рассмотрим
модели таких нелинейностей.
Моделирование ограничения
по модулю. Ограничение по модулю имеет место при ограниченной мощности звена
или задается из конструктивных соображений (например, для получения заданного
закона регулирования). В качестве практического примера можно привести устройство
для самолета с ограничением отклонения рулей при помощи упоров.
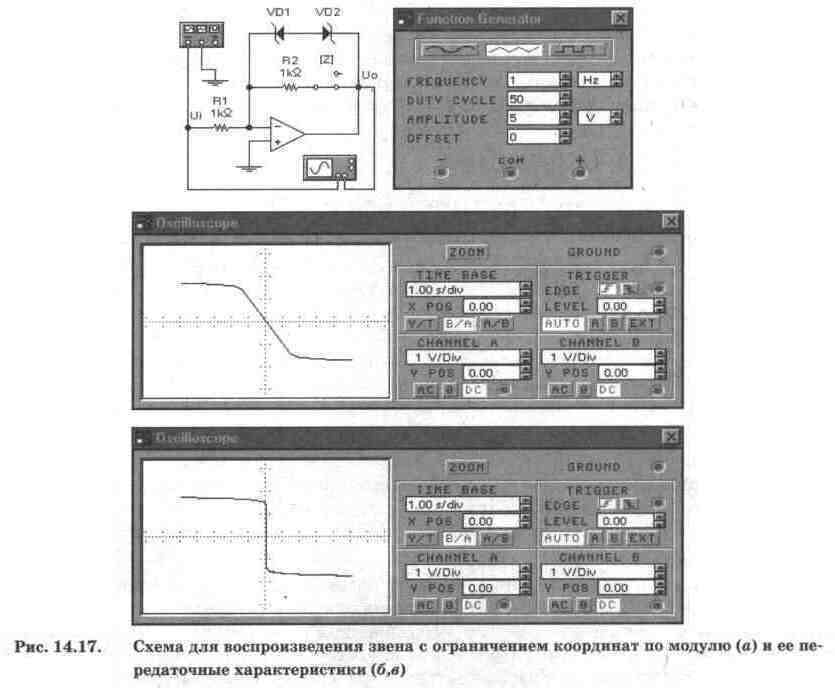
Схема для воспроизведения
рассматриваемой нелинейности показана на рис. 14.17, а, на котором показана
также лицевая панель функционального генератора с режимами его работы. Схема
преобразователя представляет собой масштабирующее звено на операционном усилителе
с коэффициентом передачи K=R2/R1. Кроме резистора R2, в цепь обратной связи
ОУ введена цепочка из встречновключен-ных стабилитронов VD1 и VD2, с помощью
которых ограничивается величина выходного напряжения и тем самым формируется
требуемая характеристика. Напряжение стабилизации обоих стабилитронов в данном
случае установлено (с помощью диалогового окна) равным 1В. Напряжение ограничения
определяется напряжением U., равным сумме напряжения стабилизации и падения
напряжения на открытом стабилитроне (около 0,6 В). Таким образом, в данном случае
U,=1,6 В.
Передаточная характеристика
рассматриваемой схемы показана на рис. 14.17, б, откуда видно, что при входном
напряжении ¦Ui¦<U. оно передается на выход с коэффициентом
передачи К=1. При ¦Ui¦>U. один из стабилитронов открывается,
а второй пробивается (для положительной полуволны входного напряжения это будут
соответственно стабилитроны VD2 и VD1) и коэффициент передачи становится равным
K=(R2¦¦R.)/R1, где R, — суммарное сопротивление открытых стабилитронов.
Поскольку обычно выбирается Rз<<R2, то коэффициент передачи K=R,/R2 существенно
уменьшается, что и приводит к ограничению выходного сигнала примерно на уровне
U..
При размыкании ключа Z
(нажатием клавиши Z) передаточная характеристика звена приобретает релейный
характер (рис. 14.17, в), поскольку при ¦Ui¦<U. цепь
обратной связи ОУ разомкнута
и коэффициент передачи практически равен коэффициенту усиления ОУ, установленному
в данном случае равным 106.
Следует отметить, что наличие
рассмотренного звена в одноконтурной системе регулирования при больших возмущениях
приводит к изменению формы кривой процесса регулирования, однако это обычно
не влияет на устойчивость системы. Наоборот, наличие такой нелинейности приводит
в большинстве случаев к повышению устойчивости. Если в линейной неустойчивой
системе возникающие в ней колебания имели бы расходящийся характер, то при наличии
звена с характеристикой на рис. 14.17, б они будут увеличиваться по линейному
закону только до значения U,. Далее выходная величина будет ограничена постоянным
значением, что равносильно снижению общего коэффициента усиления регулятора,
вследствие чего раскачивание колебаний системы прекратится. В этом смысле переход
за границу устойчивости в одноконтурной системе регулирования, включающей в
себя звено с нелинейной характеристикой типа рис. 14.17, б, является "безопасным"
(по сравнению с чисто линейной системой).
Моделирование зоны нечувствительности.
Такой вид нелинейности имеет место во многих чувствительных элементах регуляторов
и в устройствах привода. В любой одноконтурной системе регулирования наличие
зоны нечувствительности в каком-либо звене приводит к появлению дополнительной
статической ошибки. В многоконтурных
системах наличие зоны нечувствительности может привести к возникновению автоколебаний.
Все это требует специального исследования в каждой конкретной системе.
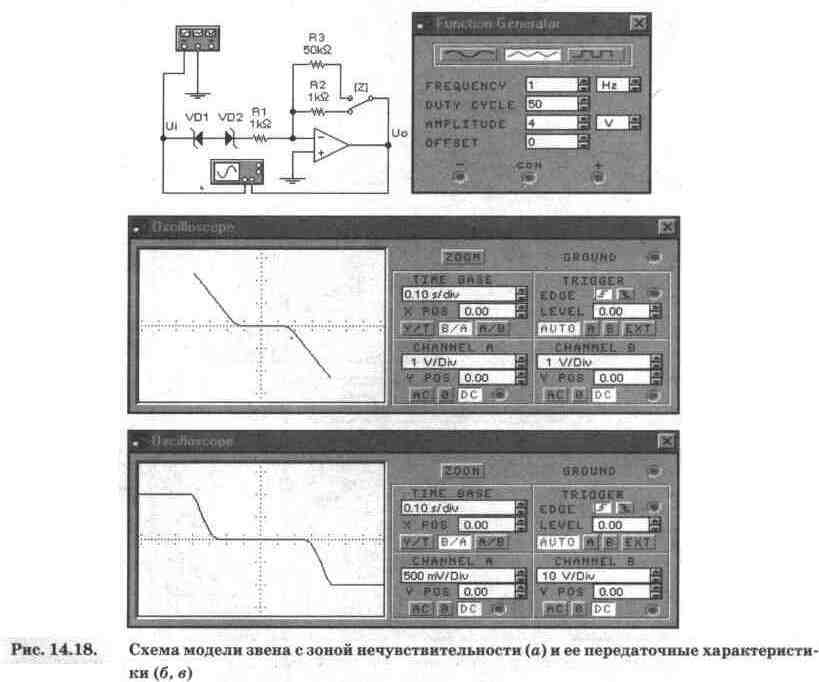
Схема для воспроизведения
звена с зоной нечувствительности показана на рис. 14.18, а. Эта схема отличается
от показанной на рис. 4.17, а тем, что ограничивающая цепь из стабилитронов
перенесена из цепи обратной связи ОУ в его входную цепь. При ¦Ui¦<U.
стабилитроны VD1 и VD2 закрыты и входной сигнал на выход усилителя практически
не передается, поскольку R2<<Rs', где Rs' — сопротивление утечки закрытых
стабилитронов. При ¦Ui¦>U. стабилитроны открываются и коэффициент
передачи усилителя становится равным K=R2/(R1+Rs)=1.
Из передаточной характеристики
рассматриваемой схемы (рис. 14.18, б) видно, что зона нечувствительности воспроизводимого
звена действительно близка к значению напряжения ограничения U,.
Если переключатель Z перевести
в другое положение, то коэффициент усиления возрастет примерно в 50 раз. При
этом на передаточной характеристике звена (рис. 14.18, в) появляется ограничивающая
ветвь, вызванная ограничивающими свойствами уже самого ОУ. Из рис. 14.18, в
видно, что ограничение наступает при выходном напряжении 20 В, что соответствует
максимальному выходному напряжению ОУ.
Заметим, что наличие ограничивающих
ветвей в передаточной характеристике на рис. 14.18, в придает ей положительная
качества, о которых говорилось выше применительно к характеристике на рис. 14.17,6.
Моделирования зазора (люфта)
в механической передаче. Такой тип нелинейности характерен для кинематических
пар, передающих вращательное или поступательное движение. При этом различают
ведущее и ведомое звено, например, ведущую и ведомую шестерню при передаче вращательного
момента, причем принимают, что ведомое звено не обладает моментом инерции. В
модели такой нелинейности должны быть предусмотрены элементы, воспроизводящие
зону нечувствительности, а также элементы, воспроизводящие неизменность выходной
координаты при изменении направления движения на время, пока весь зазор (люфт)
в узле сопряжения кинематической пары не будет полностью выбран (пройден). В
известных электронных моделях люфта для этой цели используются диодные дискриминирующие
элементы и запоминающий конденсатор [29]. При этом модель выполняется по разомкнутой
или замкнутой (следящей) схеме.
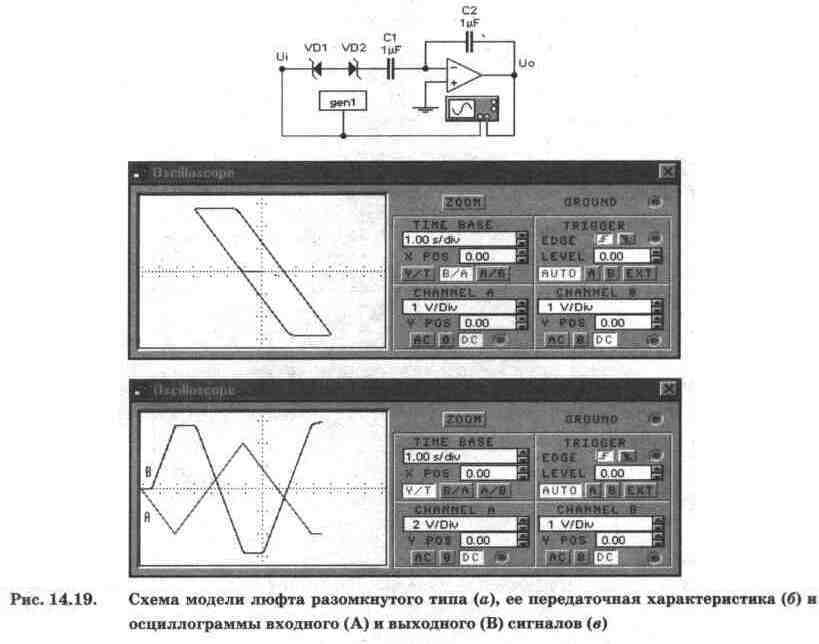
Схема модели люфта разомкнутого
типа показана на рис. 14.19, б. Она содержит цепочку из встречновключенных стабилитронов
и элемент памяти в виде операционного усилителя с конденсатором С2 в цепи обратной
связи и конденсатором С1 на входе. В качестве источника испытательного сигнала
используется рассмотренный в предыдущем разделе генератор, отличающийся тем,
что в нем формируется дополнительно
еще одна четверть второго периода (за счет увеличения Toff переключателя 3 на
2 с).
Передаточная характеристика
схемы Uo=f(Ui) показана на рис. 14.19, б, откуда видно, что она имеет гистерезисный
характер. Наклон гистерезисной кривой определяется коэффициентом передачи К=-С1/С2,
а ее ширина — удвоенным напряжением срабатывания диодной цепочки, которое заметно
меньше ожидаемого (около 3 В) и составляет, как показали измерения в режиме
ZOOM, 2,46 В. Объясняется это тем, на наш взгляд (в работе [29] отсутствует
анализ этого обстоятельства), что работа диодной цепочки в схеме модели все
время происходит на пологом участке ее ВАХ, т.е. диодная цепочка выполняет роль
нелинейного сопротивления. Диодная цепочка выполняет роль переключающего элемента
только в течение короткого времени после пуска (передаточная характеристика,
как видно из рис. 14.19, б, начинается с начала координат), когда начинается
интенсивный заряд конденсаторов С1 и С2 (см. осциллограмму на рис. 14.19, в).
Это приводит к фазовому сдвигу выходного сигнала (трапецеидальной формы), что
явилось причиной того, что передаточная характеристика модели программой не
"дорисовывалась" в течение одного периода сигнала genl. Поэтому пришлось
увеличить длительность входного сигнала еще на четверть периода.
Схема модели люфта следящего
(замкнутого) типа показана на рис. 14.20. Она состоит из сумматора на ОУ 1,
инвертора на ОУ 2, интегратора на ОУ 3 и диодной цепочки. Передаточная характеристика
схемы идентична показанной на рис. 14.19, б, ширина петли гистерезиса также
равна 2,46 В, угол наклона гистерезисной кривой определяется отношением R12/R11.
Напряжение входного сигнала Ui в этой схеме непрерывно сравнивается с выходным
напряжением Uo (с помощью ОУ 1). Если ¦Uo-Ui¦ превышает напряжение
полуширины гистерезиса (1,23 В в данном случае), то происходит срабатывание
диодной цепочки и выходное напряжение начинает ограничиваться, в результате
чего ширина гистерезиса поддерживается постоянной.
Следует заметить, что наличие
звена с люфтом (зазором) в одноконтурной системе регулирования может приводить
к возникновению колебаний в процессе регулирования с тем большей амплитудой,
чем больше ширина петли, т.е. размер зазора. При этом влияние зазора на процесс
регулирования будет более заметным при малых значениях входной величины и становится
несущественным при достаточно больших значениях (так же как и влияние зоны нечувствительности).
Наличие звена с люфтом в многоконтурной системе регулирования может во многих
случаях оказаться полезным, поскольку вводимое им в обратную связь запаздывание
может благоприятно влиять на качество процесса регулирования.
Моделирование статических
релейных характеристик. С простейшей релейной характеристикой мы уже встречались
(см. рис. 14.17, б) при рассмотрении модели ограничителя
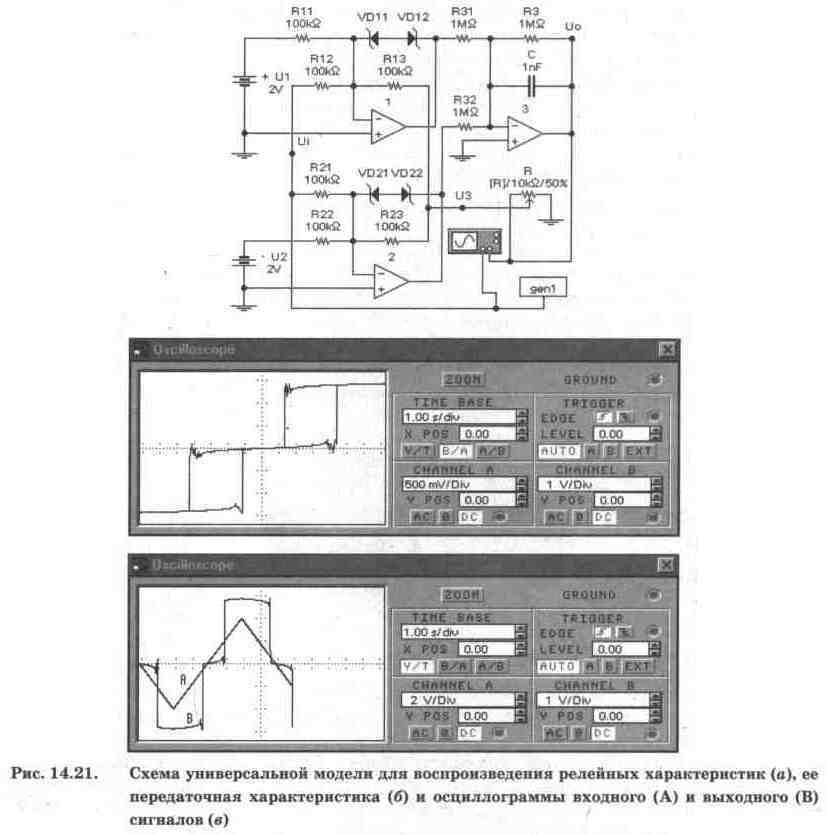
на рис. 14.17, а (при разомкнутом ключе Z). Более универсальная схема для воспроизведения
таких характеристик показана на рис. 14.21, а [29]. Она состоит из ОУ 1,2с ограничительной
диодной цепочкой в обратной связи, сумматора на ОУ 3, источников постоянного
напряжения U1.U2 и цепи положительной обратной связи (ПОС), образованной делителем
на потенциометре R и резисторами R13, R23. Напряжение U3 на подвижном контакте
потенциометра при указанном на рис. 14.21, а положении этого контакта (50% от
правого контакта потенциометра) составляет 0,5Uo. Для улучшения формы передаточной
характеристики и получения других эффектов нами был введен конденсатор С в цепи
обратной связи ОУ сумматора.
Передаточная характеристика
схемы при указанных на ней значениях параметров показана на рис. 14.21, б. Она
формируется следующим образом. Поскольку ¦U1¦=¦U2¦>Us
(Us — напряжение срабатывания ограничивающей диодной цепочки, равного, как и
для ранее рассмотренных схем, ориентировочно 1,6 В), то при t<0,
т.е. перед пуском, напряжения
на выходах ОУ 1 и 2 будут соответственно равны -U, и +U, и на выходе сумматора
Uo=0. После пуска, когда напряжение генератора geni достигнет значения -U1 (см.
осциллограмму на рис. 14.21, в), напряжение на выходе ОУ1 скачком изменится
до значения +Us т.е. на входе сумматора будут действовать два напряжения +U,
и, следовательно, его выходное напряжение Uo равно -2U, (примерно 2,6 В). При
этом сформируется (см. рис. 14.21, б) горизонтальная и вертикальная часть передаточной
характеристики в третьем квадранте, после чего начинается формирование ее плоской
части. Одновременно на входы ОУ1 и ОУ2 по цепи ПОС подается напряжение -KnUo
(Кn — коэффициент ПОС, равный в данном случае 0,5), т.е. на входе ОУ1 будет
действовать в качестве ограничительного уже не U1, а напряжение Ul-KnUo = Ul-
2KnUs (около 0.7 В). Когда после формирования плоской части передаточной характеристики
выходное напряжение генератора geni (см. рис. 14.21, в) достигнет этого напряжения,
выходное напряжение ОУ 1 скачком изменится до значения -U„ схема возвращается
в исходное состояние и формирование передаточной характеристики в третьем квадранте
завершается. Формирование характеристики в первом квадранте происходит аналогичным
образом с той лишь разницей, что при ее формировании участвует только ограничитель
на ОУ 1.
Передаточной характеристикой
типа показанной на рис. 14.21, б обладают трехпозиционные, например, поляризованные
реле, имеющие три положения контактной системы: среднее (в обесточенном состоянии)
и два крайних, соответствующих двум направлениям токов в обмотке. Реле характеризуются
током или напряжением срабатывания (в рассмотренной схеме имитируется напряжениями
U1 и U2) и током или напряжением отпускания (имитируется напряжениями U1-2KnUs
и -U1+2KnUs). Отношение тока (напряжения) отпускания к току (напряжению) срабатывания
называют коэффициентом возврата реле [38].
Схема на рис. 14.21, а
позволяет воспроизводить не только релейные характеристики, но и близкие к кривым
намагничивания магнитных материалов гистере-зисные передаточные характеристики.
В качестве примера на рис. 14.22 приведена такая характеристика, полученная
при напряжениях ограничения U1=U2=0 В, коэффициенте ПОС Кn= 0,2 и емкости конденсатора
С=0,2 мкФ.
Моделирование сухого трения.
Сухое (кулоново) трение в кинематических парах проявляется по-разному. В некоторых
случаях оно может воспроизводиться передаточной характеристикой, показанной
на рис. 14.17, в, в других — гистерезисной кривой (как у люфта). В случае вращательного
движения такое звено характеризуется нелинейной зависимостью момента сухого
трения от угловой скорости, а в случае поступательного движения — нелинейной
зависимостью силы сухого трения от поступательной скорости перемещения. Представление
этой зависимости в виде релейной характеристики на рис. 14.17, в справедливо
только для случая,
когда момент (или сила) сухого трения имеет постоянное значение независимо от
величины скорости или когда вращающий момент при трогании механизма существенно
превосходит момент сухого трения. Если вращающий момент при этом меньше максимально
возможного значения момента сухого трения, то последний может принимать различные
(в том числе и непредсказуемые) значения в диапазоне от минимального до максимального.
В различных системах влияние сухого трения на процесс регулирования может быть
самым разнообразным. Во многих случаях оно дает полезный эффект демпфирования
колебаний. В некоторых особых случаях оно может служить причиной возникновения
нежелательных колебаний, в частности, автоколебаний. Часто сухое трение может
быть причиной различных застоев и нечувствительности регулятора к малым отклонениям.
Оно может иногда вызывать неплавное движение с задержками и рывками и т.п.
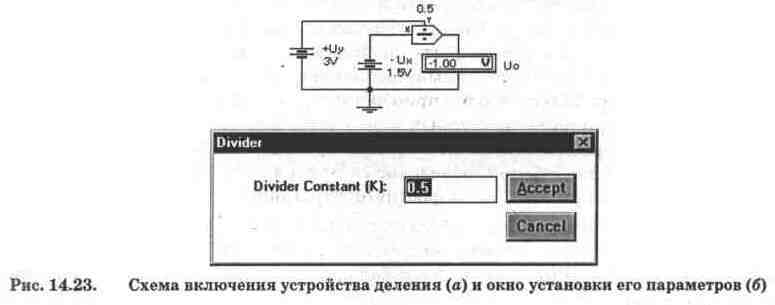
В заключение рассмотрим
компоненты программы EWB 4.1, которые могут быть использованы для воспроизведения
характеристик элементов автоматических систем. К таким моделям могут быть отнесены
в первую очередь устройства умножения и деления. Множительное устройство было
рассмотрено в гл. 13 при моделировании модулятора амплитудно-модулированных
колебаний и преобразователя частоты. Схема для демонстрации работы устройства
деления показана на рис. 14.23, а, а диалоговое окно для задания его параметров
— на рис. 14.23, б. На вход Y элемента подается делимое, а на вход Х — делитель.
Выходное напряжение устройства Uo=KY/X, где К — коэффициент передачи устройства
(индицируется над графическим изображением компонента), задаваемый в диалоговом
окне на рис. 14.23, б. Как видно из рис. 14.23, а, показания включенного на
выходе вольтметра соответствуют расчетному значению Uo с учетом знака делителя.
Контрольные вопросы и задания
1. Какую передаточную характеристику
имеет звено с ограничением координат? Приведите пример такого звена.
2. Какие элементы в схеме
на рис. 14.17, а используются для формирования области ограничения на передаточной
характеристике?
3. Получите передаточные
характеристики схемы на рис. 14.17, а при напряжении стабилизации стабилитронов
3, 5 и 10 В. Каким образом можно выполнить ограничивающую цепь на обычных диодах?
4. Чем отличается модель
звена с зоной нечувствительности от модели звена с ограничением координат?
5. Получите передаточные
характеристики схемы на рис. 14.18, а при напряжении стабилизации стабилитронов
3, 5 и 10 В.
6. Приведите пример механической
передачи с люфтом. Какой характеристикой обладает такое звено и к каким эффектам
приводит его использование в системах управления?
7. С помощью каких элементов
в схеме на рис. 14.19, а формируется ширина гистерезиса, имитирующая зону нечувствительности
звена с люфтом?
8. К какому типу релейных
элементов можно отнести элемент с передаточной характеристикой на рис.14.17,
в?
9. Что такое коэффициент
возврата реле?
10. Каким образом в схеме
на рис. 14.21, а задается напряжение срабатывания реле?
11. Получите передаточную
характеристику схемы на рис. 14.21, а при U1=3 В и U2=0 В. Какому типу реле
соответствует полученная характеристика?
12. Каким образом в схеме
на рис. 14.21, а задается напряжение отпускания реле?
13. С помощью какой схемы
можно воспроизвести кинематическую пару с сухим трением? Разработайте модель
для случая, когда момент на ведущем валу (на ведущей шестерне) меньше момента
трения.